
Adithya Rajendran
Building intelligent robotic systems that bridge perception and action.
About Me
I'm a Robotics & AI Engineer passionate about building intelligent systems that can perceive, reason, and interact with the physical world. Currently pursuing my Master's in Robotics at Northeastern University, I focus on the intersection of machine learning and robotic manipulation.
My research interests lie in Physical AI — developing robots that learn from vision-language models to perform complex manipulation tasks. I work extensively with frameworks like SmolVLA, ACT policies, and reinforcement learning to create adaptive robotic behaviors.
I believe the future of robotics is in systems that can understand human intent through natural language and visual cues, then translate that understanding into precise physical actions.
Research Focus
- Physical AI & Embodied Intelligence
- Vision-Language Models for Robotics
- Robot Learning & Manipulation
- Motion Planning & Control
Technical Skills
Physical AI
Robotics Simulation
Perception & Navigation
Languages & Tools
Hardware
Experience
Research Assistant
Silicon Synapsis Lab, Northeastern University- Engineered and validated control policies for a hybrid multi-modal robot (legged and aerial) in Gazebo, ensuring seamless mode transitions and collision-free navigation across >600 graph nodes
- Accelerated robot path-planning by 40% by porting Probabilistic Roadmaps (PRM) and A* algorithms from MATLAB to optimized ROS 2 C++
- Developed custom cost functions within the navigation stack to prioritize energy efficiency, reducing onboard CPU usage and power consumption
Research Intern
Indian Institute of Technology, Delhi · Prof. SK Saha's Lab- Architected an LLM-driven agent on edge (Raspberry Pi) using OpenAI Whisper and ChatGPT, achieving 2x lower latency for real-time natural language command execution
- Reduced collision incidents by 90% by implementing a LiDAR-based perception pipeline and tuning Nav2 parameters (Behavior Trees, Costmaps, AMCL)
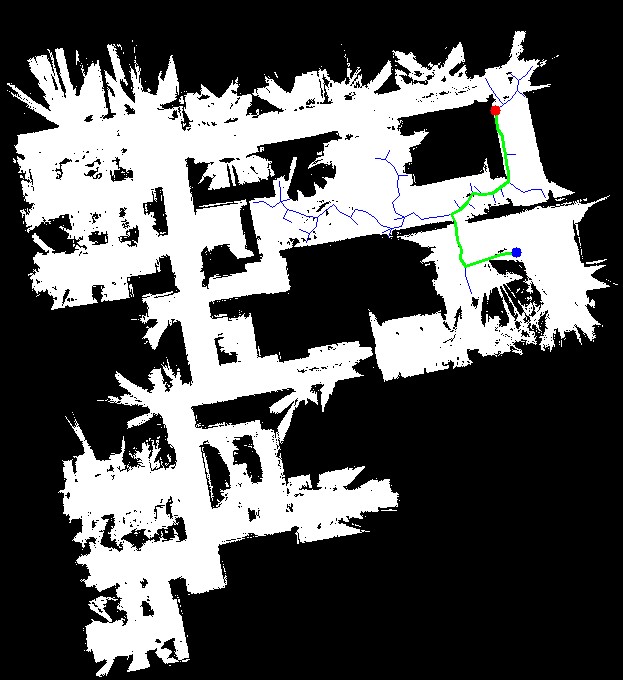
- Developed a wavefront-frontier exploration algorithm integrated with SLAM, achieving 95% automated map coverage without human teleoperation
Research And Development Intern
SeiAnmai Technologies · IIT Delhi Campus- Developed TOTOCE robot for autonomous navigation in crowded environments, showcased at Robocon 2024
- Implemented LiDAR-based perception pipeline with Nav2 tuning (Behavior Trees, Costmaps, AMCL), reducing collision incidents by 90%
- Built wavefront-frontier exploration algorithm integrated with SLAM, achieving 95% automated map coverage
Project Intern
RobotoAI Technologies- Developed robot localization and navigation techniques for autonomous mobile robots
- Implemented SLAM and AMCL algorithms for precise robot positioning and mapping
- Integrated multiple sensors and built path planning systems for collision-free navigation
Student Intern - Center of Excellence
Titan Engineering & Automation Limited- Conducted process analysis and optimization in manufacturing environments
- Implemented Industrial Internet of Things (IIoT) solutions using IOT2050 devices
- Utilized FlexSim for manufacturing process simulation and workflow optimization
Industrial Trainee
AGIIT- Completed hands-on training in PLC programming and industrial automation systems
- Gained practical experience with relay logic and control system fundamentals
Featured Projects


Education
Master of Science - Mechatronics, Robotics, and Automation Engineering
Northeastern University, Boston
August 2024 - December 2026 (Expected)
ROS2
SLAM
Computer Vision
Visual SLAM
Sensor Fusion
Reinforcement Learning
Bachelor of Engineering - Mechatronics, Robotics, and Automation Engineering
PSG College of Technology, India
2020 - 2023 | GPA: 8.4/10
ROS
PLC
SOLIDWORKS
Industrial Automation
Siemens TIA Portal
CAD
High School Diploma - Mechatronics
PSG Polytechnic College, India
2017 - 2020 | Grade: 85.75%
Winner - District Skill Competition 2020 (Mobile Robotics)
PLC
PTC Creo
Hydraulics
Pneumatics
SIMATIC STEP 7
AISSE (Secondary School)
SSVM Institutions, India
2017 | CGPA: 9.4/10
FIRST Tech Challenge National Championship 2017 | FLL India 2015 National Qualifier